Modular MPC for RoboBee (IJRR 2022)
#papers #robobeeTODO: get from RI seminar slides
My second paper from my Harvard postdoc “An efficient, modular controller for flapping flight composing model-based and model-free components” is out on IJRR. This paper was a culmination of learning numerical optimization and microfabrication during my Harvard postdoc. The latter was especially challenging due to COVID making it impossible to have a collaborative lab where you can actually ask for guidance when you don’t know how anything works.
While the results are relatively modest, the concepts are interesting in my opinion. Specifically, in Kodlab we thought that optimization-based methods could not be made modular or compositional. While in most research papers, that ends up being true, there are some notable exceptions. For example,
- Todorov: Analysis of the synergies underlying complex hand manipulation, Compositionality of optimal control laws
- Kuindersma: An Efficiently Solvable Quadratic Program for Stabilizing Dynamic Locomotion
Fun fact: I initially went to Harvard intending to work with Scott Kuindersma, but he moved to Boston Dynamics basically the moment I joined. 😂
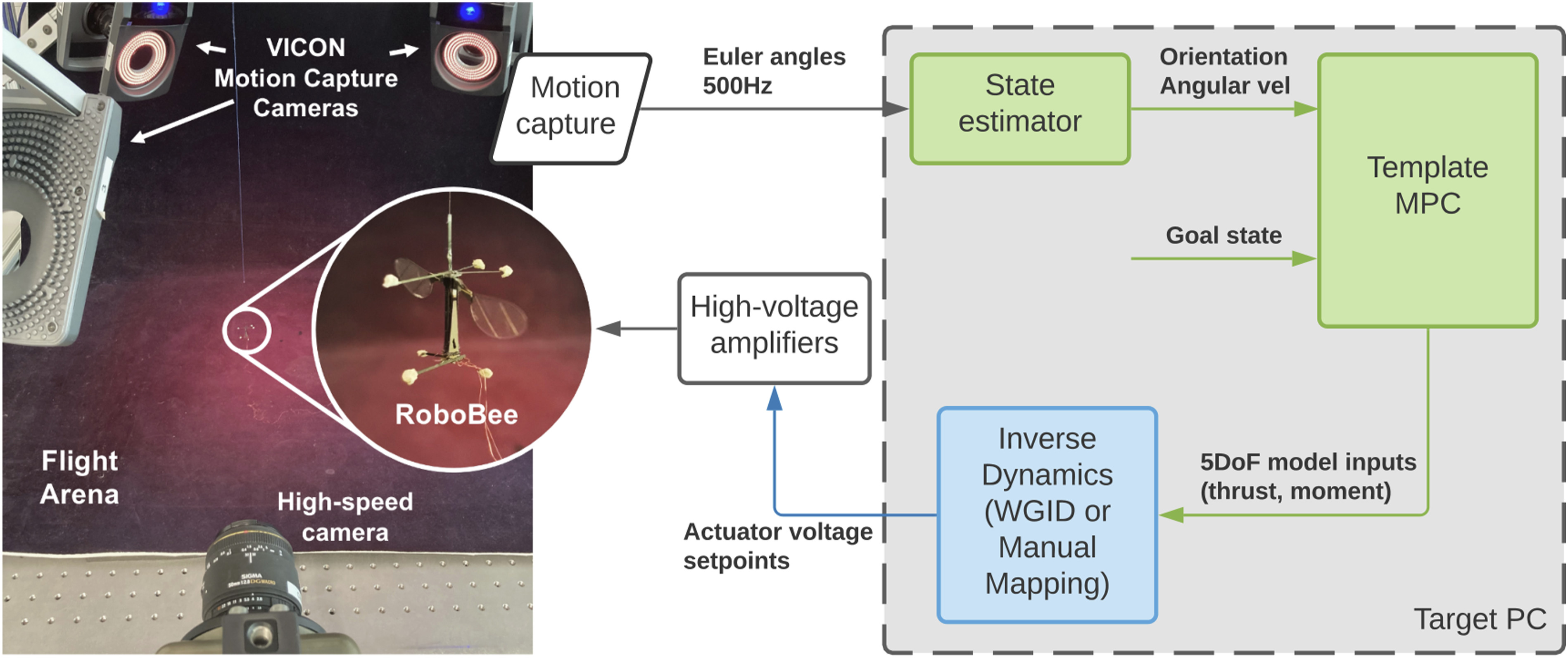
System architecture:
Hovering clips:
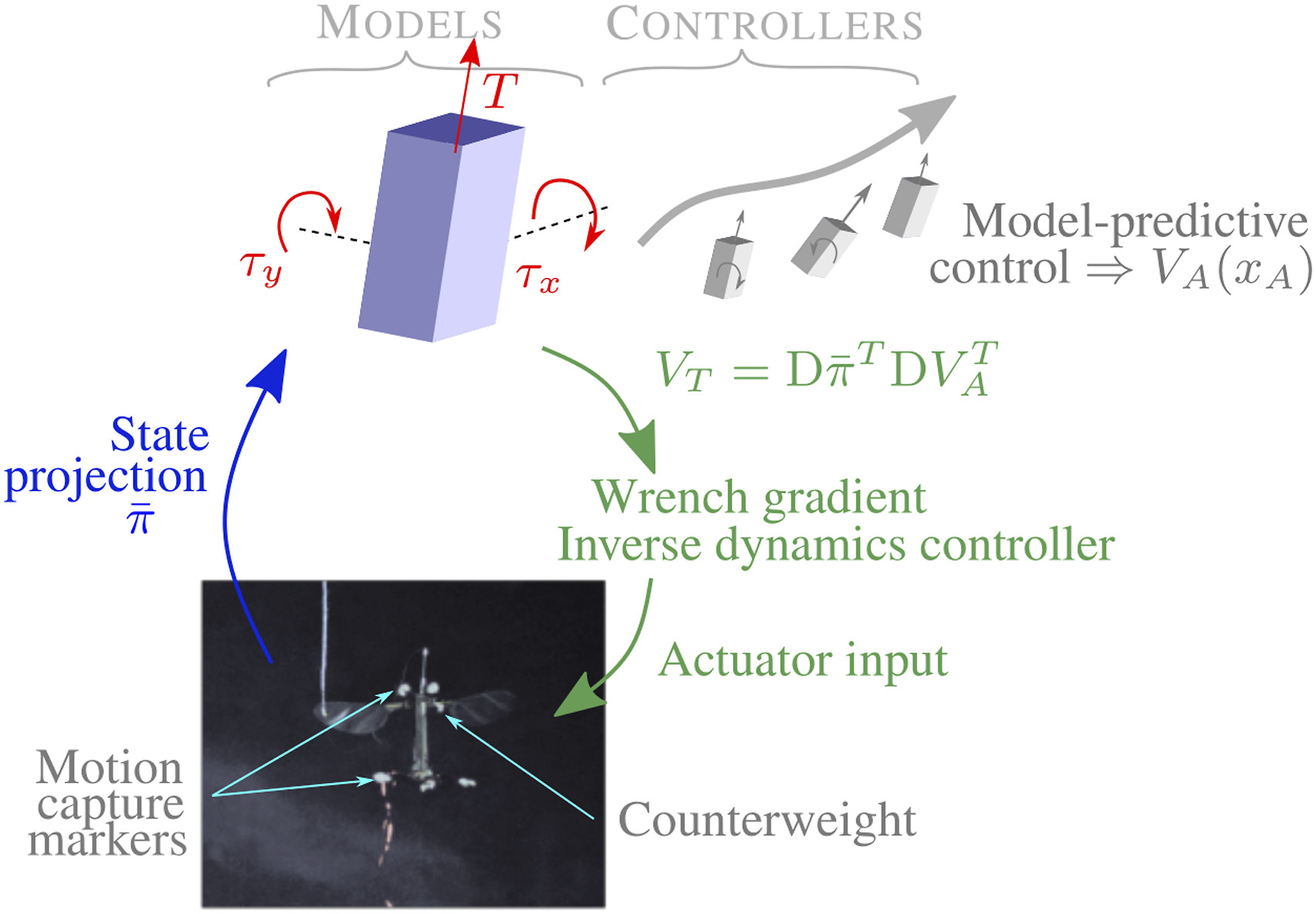
Model-based template controller
Template: upright rigid body
Waypoint tracking MPC
Linearization and discretization.
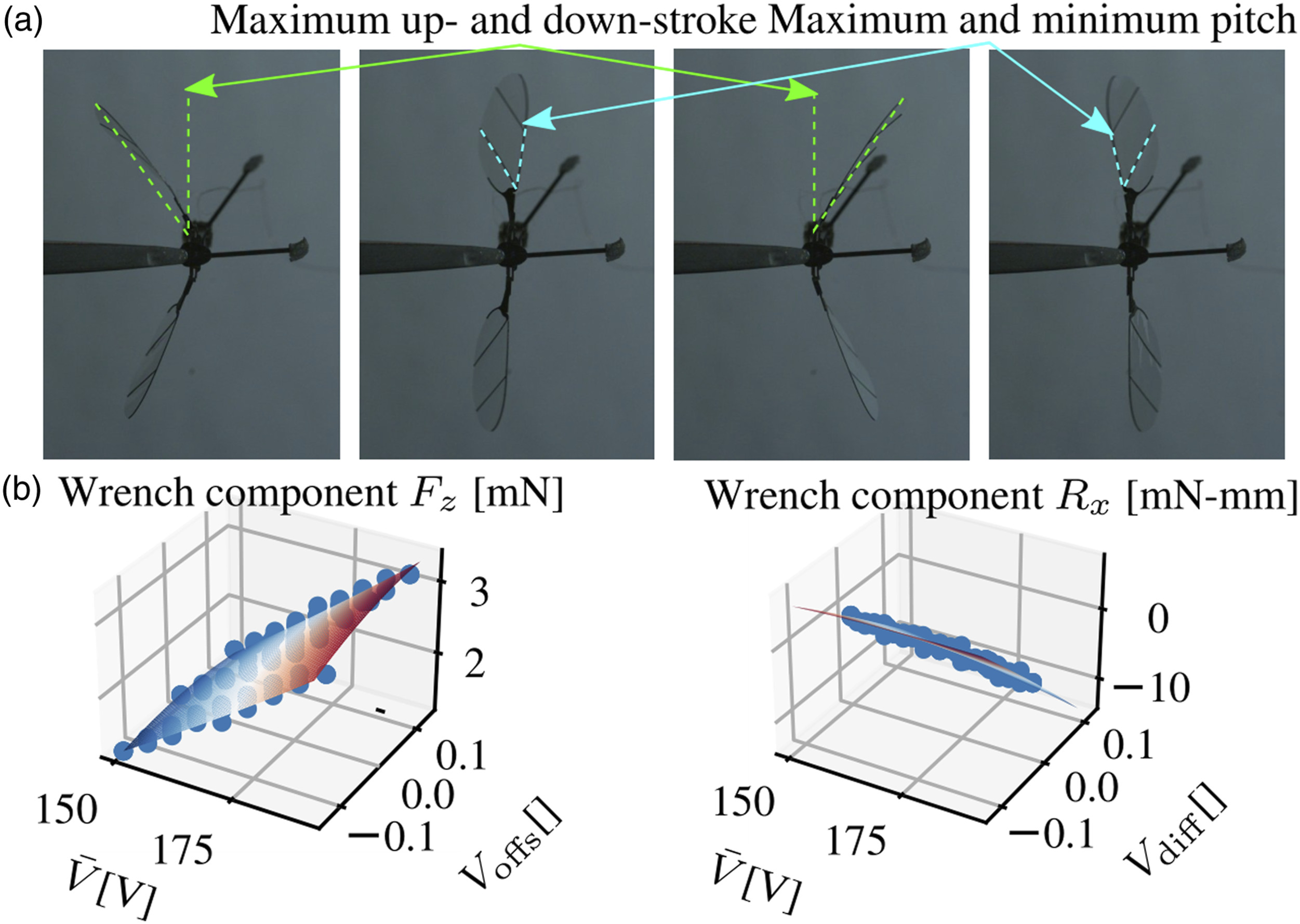
Wrench-gradient based inverse dynamics
Data-driven
Kinematics features